Returning Home
concept

(This sculpture is an ode to undo-ing.)
initial questions
What happens once we are put in a physical situation where the undo button is untouchable ?
What happens when you are faced with a physically unavoidable situation, while simultaneously faced with the fact that if the situation was digital, all that would be need is a simple ‘undo’ ?
researching these questions
Mind-mapping ‘home’

Learning how source control can work visually, explained here: http://stackoverflow.com/questions/37141406/making-a-history-panel-for-a-paint-program
precedences dealing with these issues


Gregor Calendar from Patrick Frey. Expressing ephemerality.
research and influences

prototyping: what worked and what didn’t




Continuous Servo + RPi (written in Python, limited control over code)
Step Motor + Arduino (stopped working once mapped to potentiometer)
Step Motor + RPi (too slow! even without the potentiometer)
what was learned
Motors work differently – Servos , DC Motors, Step Motors work with magnets and gears.
Current runs through a coil, with controls the polarity of the magnet, changing the direction of the gears.
Didn’t need Picamera or openCV to achieve the effect I needed.
Continuous servos, give control over speed, not position.
For analog inputs on RPi, you need an external ADC (MCP3008).

the final instantiation
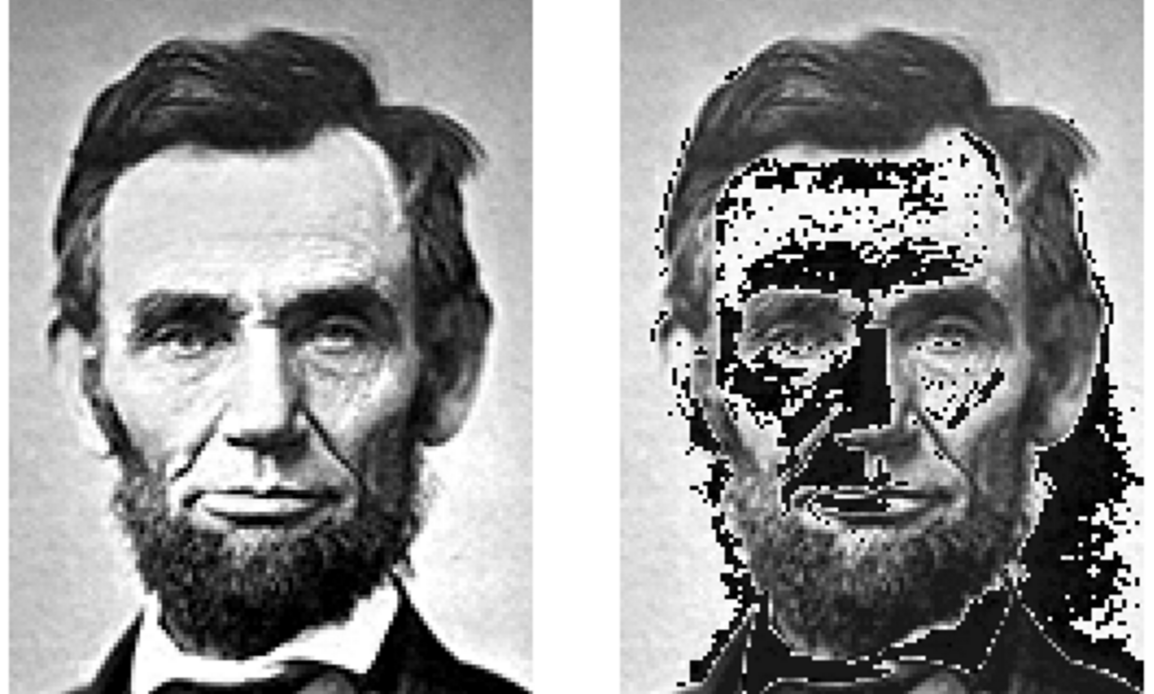
The video serves as my final iteration of this concept.
It is a narrative of some recorded voices.
The moving parts work as you:
The ofSketch is projected onto knit.
Turn the potentiometer -> changes servo speed + scroll through ofSketch
The servo is attached to the knit -> the knit unravels, and is pulled around the nest. The nest grows in size.
BOM
RigidWrap plaster
felted wool
continuous servo
10ohm potentiometer
arduino
laptop
picco pocket projector
jersey knit
basswood panels
lots of tape + glue
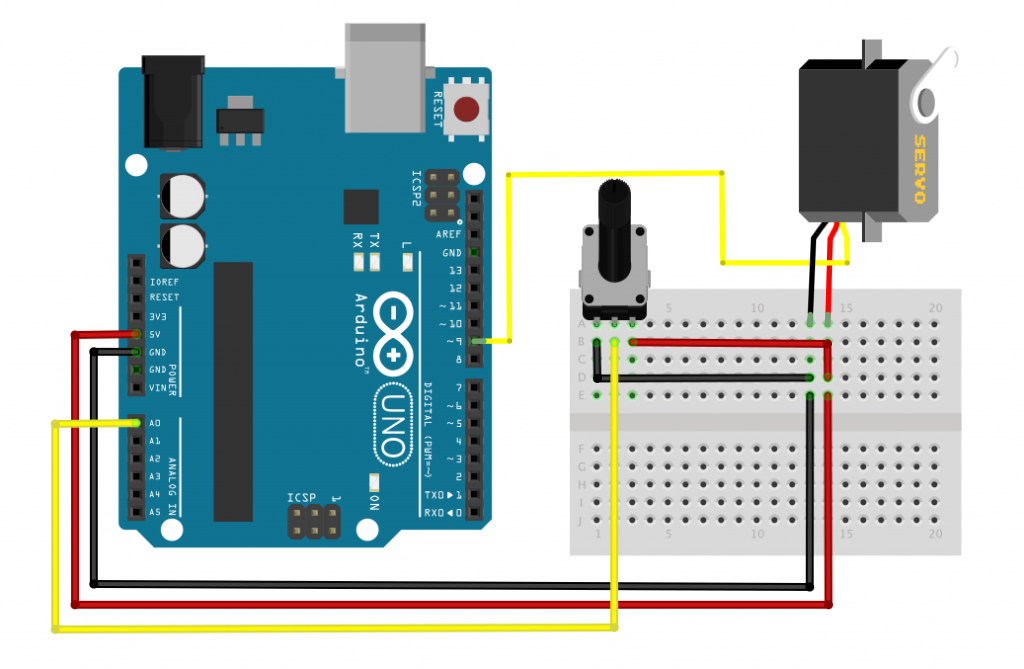
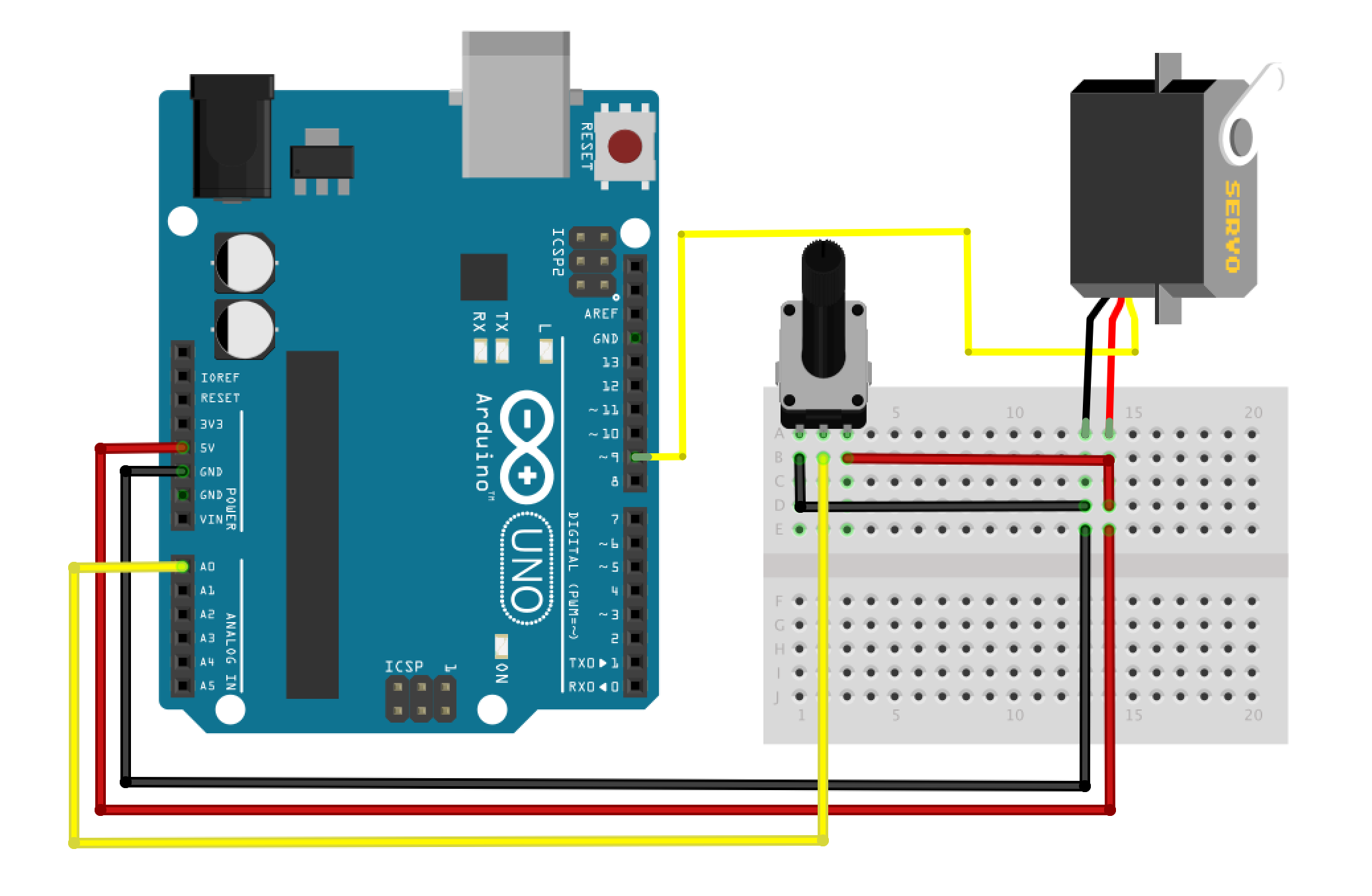
final fritzing sketch
code attribution
https://github.com/jessherzog/viewport?files=1
OpenFrameworks
Moving images / Serial : Michael
Incorporating Perlin Noise : Andreas Muller https://github.com/andreasmuller/NoiseWorkshop/tree/master/PerlinLayeringFBM
Servo, Arduino + RPi
Servo.py Simon Monk http://razzpisampler.oreilly.com/ch05.html
Custom Stepper library : Igor Campos http://playground.arduino.cc/Main/CustomStepper
Matt Hawkins http://www.raspberrypi-spy.co.uk/2012/07/stepper-motor-control-in-python/ / https://bitbucket.org/MattHawkinsUK/rpispy-misc/raw/master/python/stepper.py
future directions
Add decay to the images as they slowly disappear in OpenFrameworks.