[Studio: Environment] 5 Min Presentation
These are the slides of my first presentation in Studio: Environment.




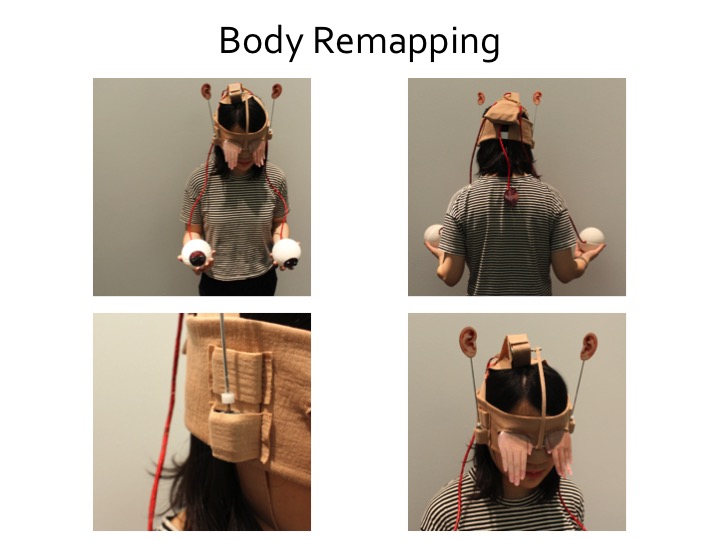
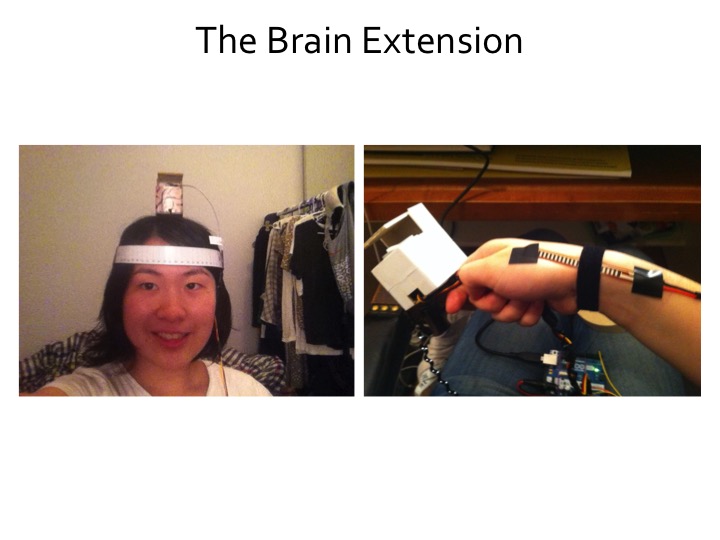


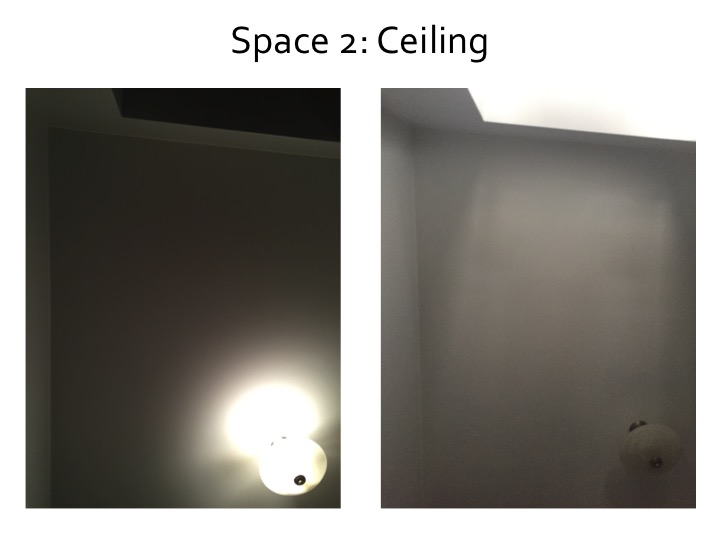

These are the slides of my first presentation in Studio: Environment.
This response focuses on the comparison and progression of the first two lectures in this book.
In the first Lecture, Merleau-Ponty examines the relationship between perception and science. Perception is primitive and subjective, inciting our curiosity over time for a universal understanding of the nature. This curiosity motivates us to summarize and conclude from our perception, to distill objectivity out of subjectivity, and therefore, to form scientific knowledge. The development of our perception brings us closer to the rational nature. In addition to our instinct perception of the surroundings, science aids in our understanding with the essence of wisdom, the distillation of various versions of perception. However, science does not equal to nature. It is still essentially the outcome of the subjective perception, the perspective from human beings as a species. Does objectivity really exist? Merleau-Ponty answers that science is the approximation of nature. Objectivity may never appear if subjectivity does not exist in our perception. The objective is always relative to the subjective. The relationship between the two is probably the impetus for us to endlessly explore of the nature and position ourselves in this world that we have not yet fully understand.
If scientific knowledge makes us wise, then the encouragement of expressing our unique perception makes us sophisticated. After we develop a fair understanding of the nature, the subjective perception is once again encouraged. The nature will not be as colorful and meaningful without the creativity inside subjectivity. Art becomes one of the media that we use to express and share our perception. Cubism follows the inherent method of our perception – observing the environment from different angles, from which the objects appears differently every time. Instead of calculating and synthesizing different images imprinted into our mind, the cubists display the images as what they are, without processing them to form one full image from a fixed perspective. However, does this method truly reflect on the inherent way of perception? Or does it merely add one more procedure to our previous method of exploring the science? After habitually converting pieces of images into one, the cubists invert the one image back to pieces again. Another possibility is that they intentionally block the route of converting pieces into one and stick the pieces directly onto the canvas. The idea of cubism is to cherish the intrinsic perception. However, to deliberate the actual process of the painters forming the images, it might only defy this initial intention.
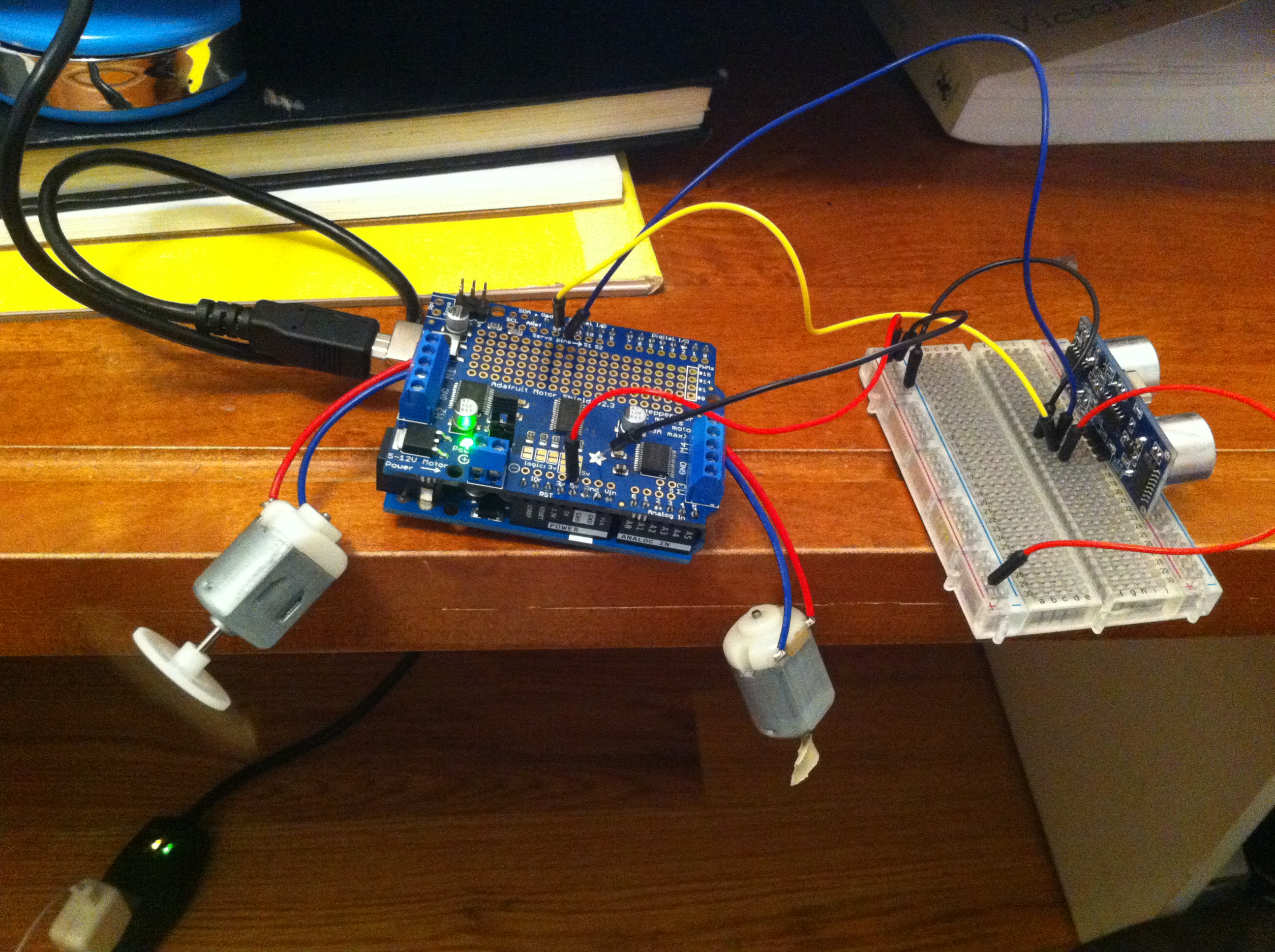
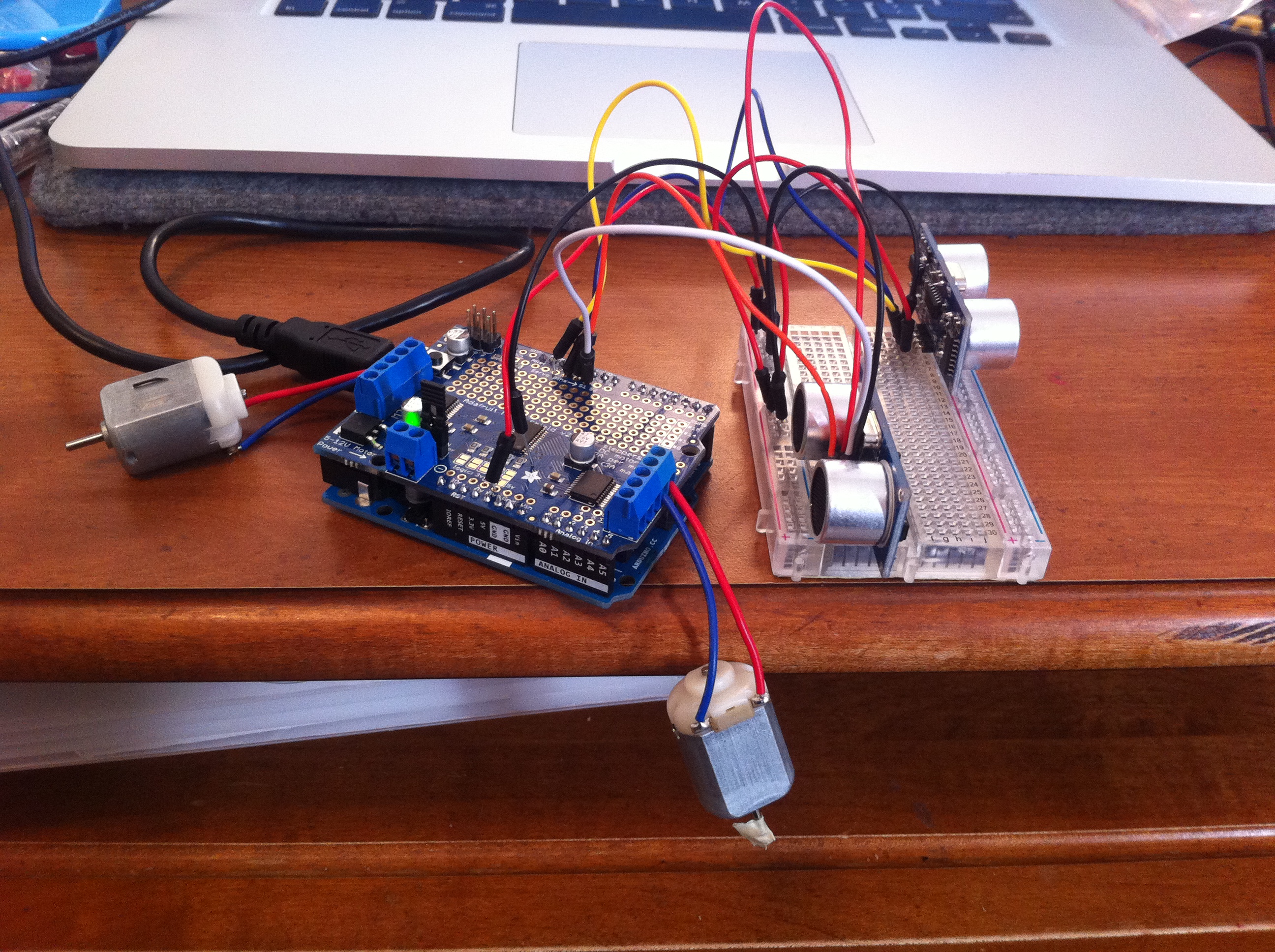
Team: Innocent Arduino Beginners
Team members: Kim, Sean, Shubs, Yumeng
The following links are the two introductory Arduino questions that we posted on the forum. People are nice. We’ve got answers in an hour!
http://forum.arduino.cc/index.php?topic=296919.0
http://forum.arduino.cc/index.php?topic=296930.0
In addition, all of my posts for Core Lab:Environment will start with [Lab: Environment] and they can be found under Topics: Core Lab: Environment at the bottom of the blog.
Last comment: Anthony is awesome!
In the Castronaut project, our team Neon Blackboard created a universe of cat astronauts’ heads in Unity and configured the sketch in Oculus Rift. We also had a audio input which triggers the change of size and color of the cat heads. We presented this project at PlayTech and more pictures are coming soon.
It was our first time using Unity; the entire progress was very challenging. We searched for lots of sample script for our sketch, along with the tremendous help from Kyle Li and Ryan Hall. It was indeed the most rewarding project of the semester.
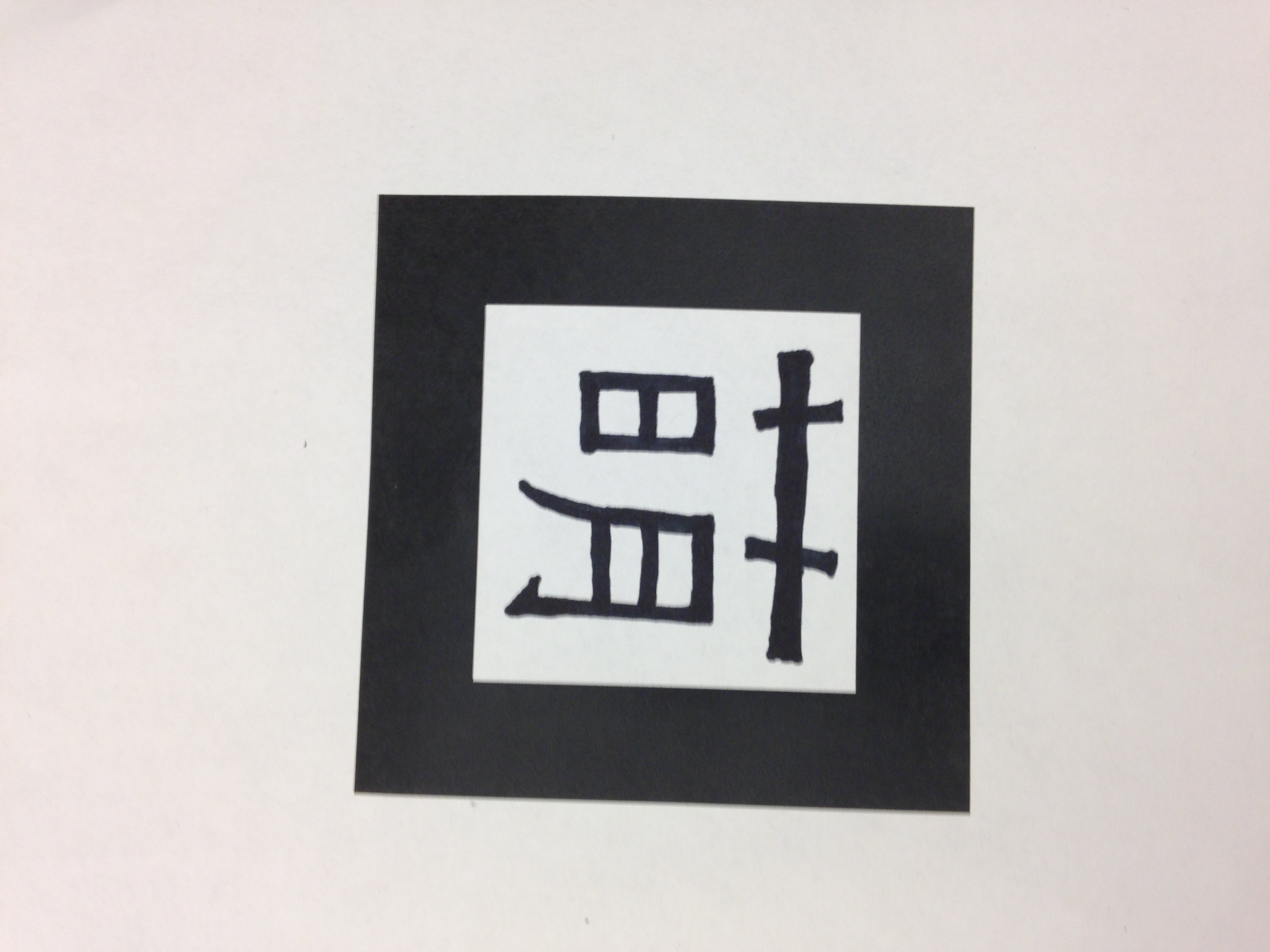
Last year I went to Dorkbot NYC and watched a talk from a NYU person introducing the augmented reality phone app that they were developing called Layar. Through the camera of the phone, the audience were able to see virtual objects coming to their surroundings and moving around them continuously. It was incredibly enjoyable to do something similar (but simpler) in our Core Lab. We tested a Japanese processing library that enables the camera on the computer to detect the “marker” on the paper, a patter we designed and generated with this Marker Generator. We have generated four “marker” files of different resolutions: 4×4, 8×8, 16×16 and 32×32. The camera detected the bold black border of the “marker” first and then recognize the pixel patterns inside.
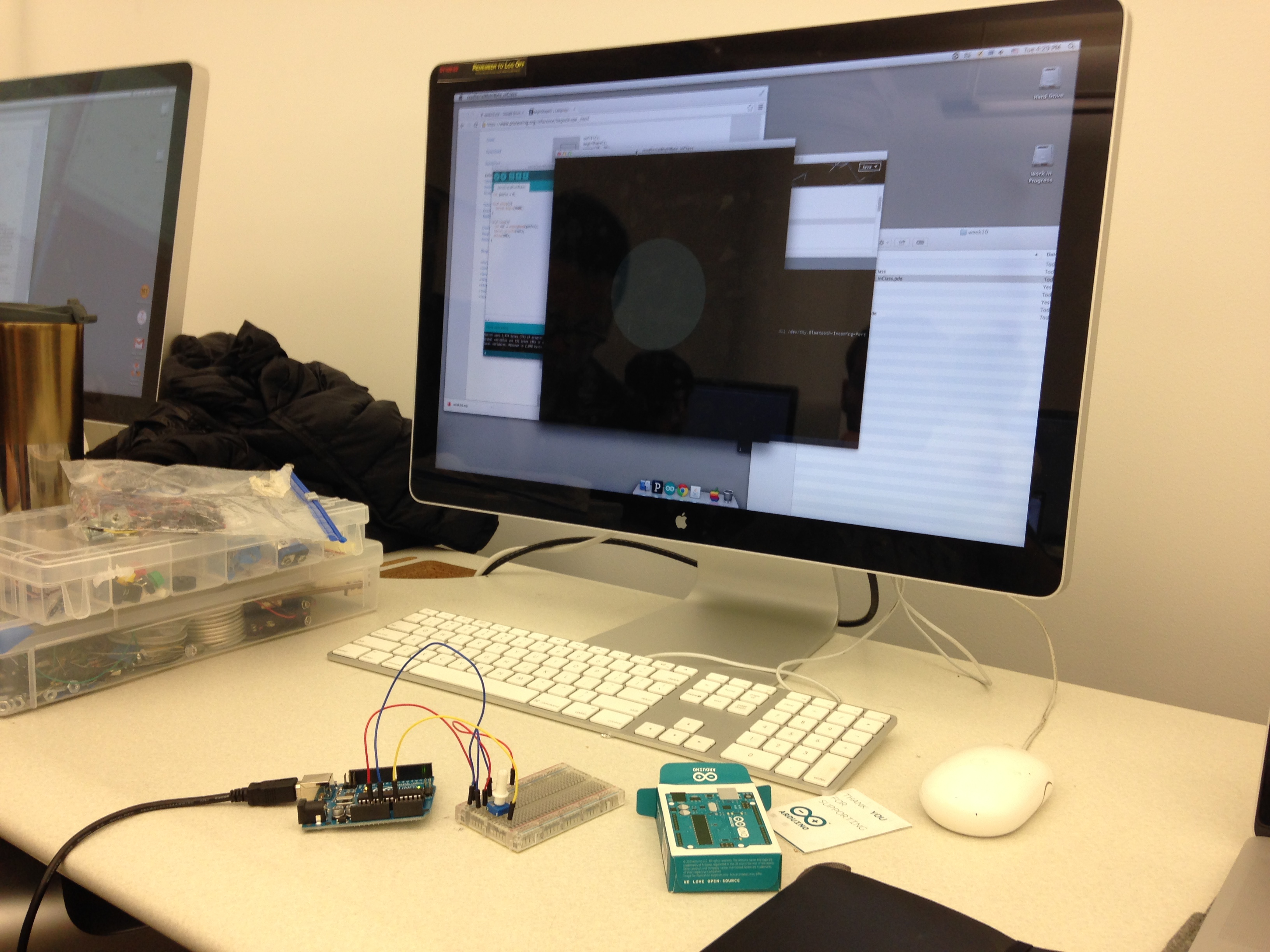
In the following class, we expanded our knowledge of beginShape() and endShape() in processing by creating an ellipse with beginShape(Quad_Strips ). We further tested augmented reality with a potentiometer that controlled the visual effects around it.


Here is the video documentation:
Augmented Reality in Processing – Nyar4 Library Test from Yumeng Wang on Vimeo.
We downloaded Daniel Shiffman’s Processing library for Kinect and ran the example sketches. Unfortunately, none of us had the Kinects working on our computers. The Kinect only worked on Kyle’s computer.